
Power-assisted wheelchair with gravity and friction compensation
- Easy movement on slopes as on flat land
- Compensation of the gravity force
- Compensation of the friction force in the driving mechanism






No metal artifact

Better QA performance than conventional 3D simulations




Abdominal breathing machine

Quadriplegic singer using abdominal breathing machine
출처 https://tv.naver.com/v/1359182

Abdominal breathing machine and
wheelchair for Pompe patient

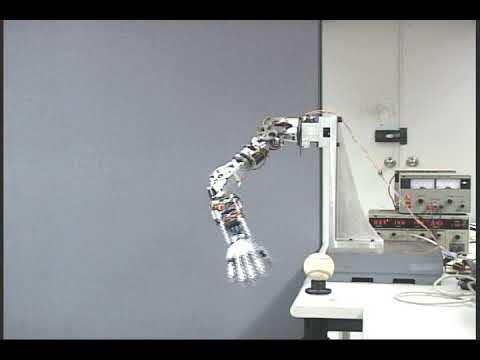
C-arm



Experimental setup

Master device (2x playback)

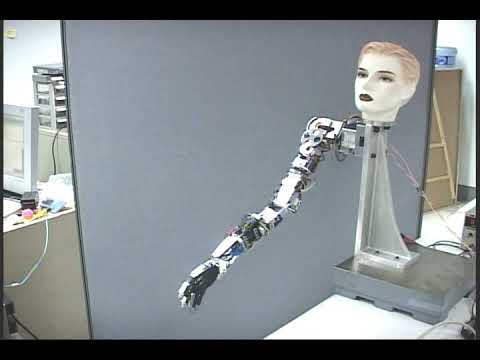
Demonstration of teleoperation (2x playback)
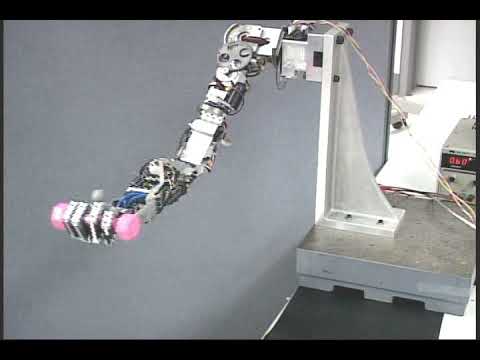
Gripping and throwing a ball
Adjustable torsional stiffness
External force sensing
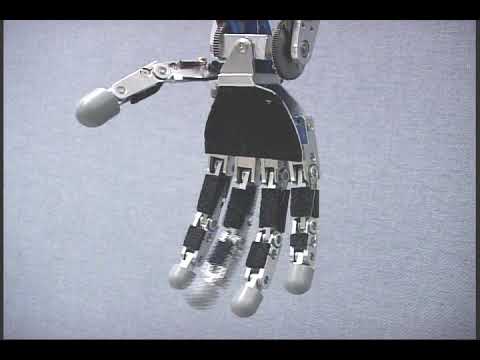
8-DOF compact robot hand

Circular motion
Reading the online newspaper

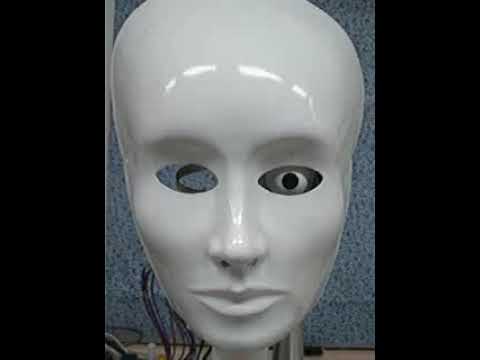
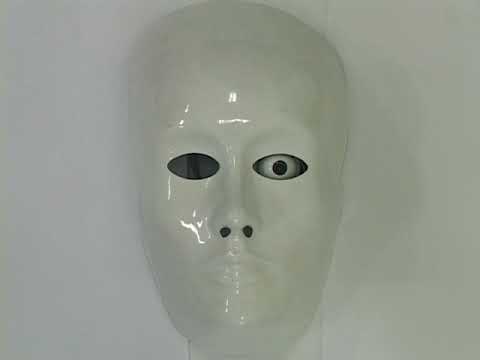
Eyeball movement faster than human's





10th floor, 214, Yulgok-ro, Jongno-gu, Seoul, 03122, Korea
Copyright 2020. Medical Robotics and Actuator Systems Laboratory. Seoul National University Hospital. All Rights Reserved.